obnizで作る歯ブラシロボット
歯ブラシロボットはタイヤの代わりにブラシがついていて、ブラシに振動を与えると、毛並みの非対称性から特定の方向に進むという性質を利用したロボットです。
このロボットでは2個の振動モーターをPWM制御し、左右のブラシをそれぞれ操作することで、直進・右折・左折ができます。
さらに前面には距離センサーを搭載し、前方に障害物がないか、スマートフォンの画面でリアルタイムに確認することができます。
コンテンツ
用意するもの
- obniz x1
- obnizの電源 x1
- GP2Y0A21YK0F(赤外線距離センサー) x1
- 振動モーター x2
- 歯ブラシの頭 x2
- スマートフォン x1
組み立て方
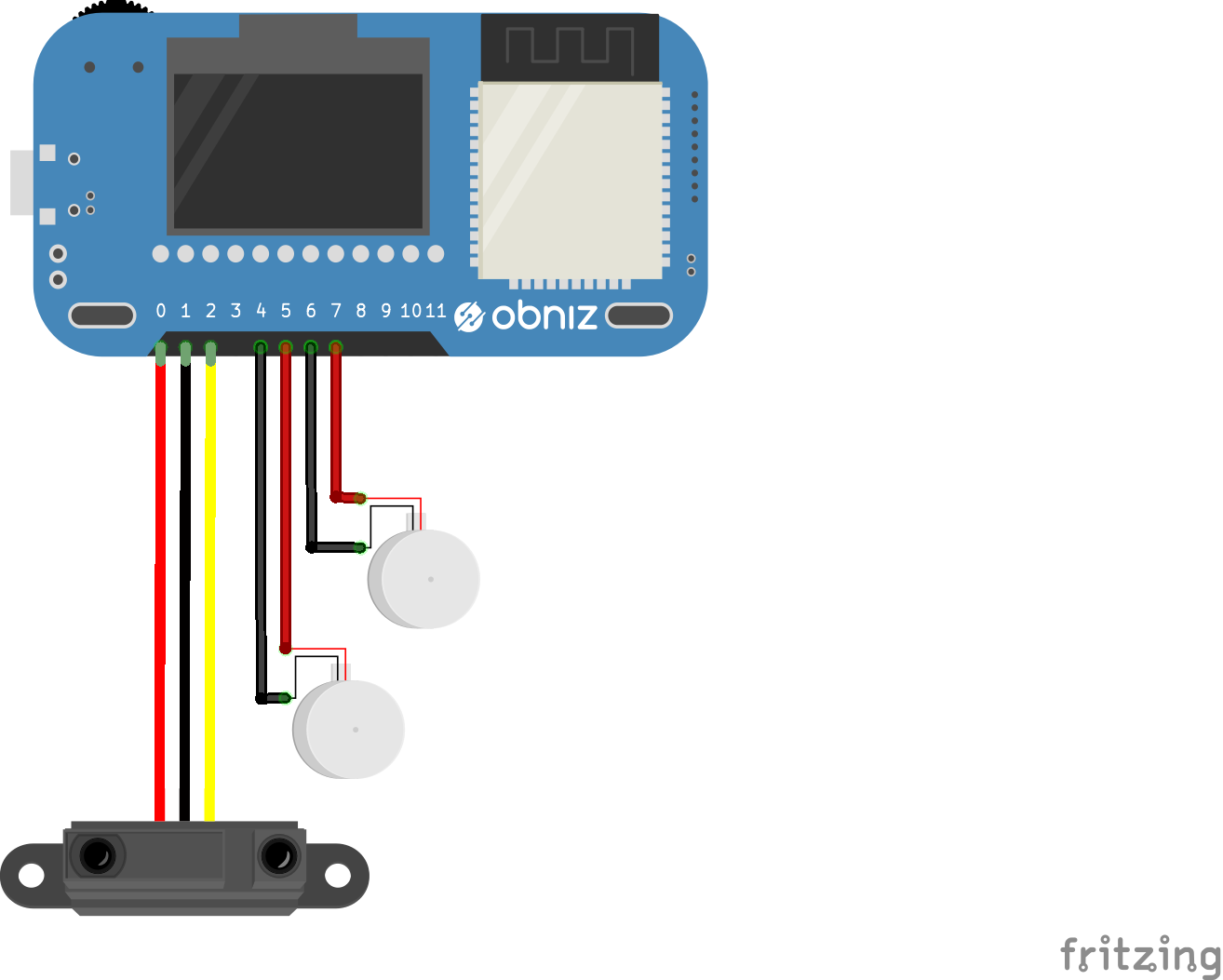
以下の表や図のように配線します。2つの振動モーターはそれぞれ2つの歯ブラシの上に、GP2Y0A21YK0F(赤外線距離センサ)は歯ブラシの前側に設置します。
| obniz | 部品 |
|---|---|
| 0 | GP2Y0A21YK0F Vcc |
| 1 | GP2Y0A21YK0F GND |
| 2 | GP2Y0A21YK0F signal |
| 4 | 振動モーター1 GND |
| 5 | 振動モーター1 Vcc |
| 6 | 振動モーター2 GND |
| 7 | 振動モーター2 Vcc |
完成したプログラム
うごかす
obnizを電源に繋いでブラウザやobnizのコンソールでプログラムを実行すると、以下のような歯ブラシロボットの操作画面が表示され、歯ブラシロボットを操作できます。
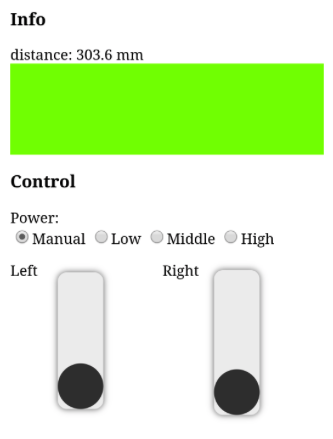
画面のInfoのエリアの色は、前方の障害物までの距離に応じて、遠いほど緑、近いほど赤に変わります。 Manualモードでは、画面のControlエリアのスライダーで左右の振動の強さを調整することで、直進・右左折を自由にコントロールすることができます。 ロボットが見えない場所から、画面の色だけを見て操縦してみるのも面白いかもしれません。 PowerをLow/Middle, またはHighにするとAutoモードとなり、普段は直進し続け、障害物に近づくと自動的に右折することで、半永久的に動き続けることもできます。
なお,ブラシは毛先が斜め後ろを向くように癖をつけておく必要があります。 また1台のスマートフォンからたくさんのobnizを同時に操作することもできるので、このようなロボットをたくさん作り、同時に動かすとお互いに作用して面白いかもしれません。
今回やること
あの歯ブラシロボットが、世界中どこからでも操作できるようになりました。
歯ブラシロボットはタイヤの代わりにブラシがついていて、ブラシに振動を与えると、毛並みの非対称性から特定の方向に進むという性質を利用したロボットです。
このロボットでは2個の振動モーターをPWM制御し、左右のブラシをそれぞれ操作することで、直進・右折・左折ができます。
さらに前面には距離センサーを搭載し、前方に障害物がないか、スマートフォンの画面でリアルタイムに確認することができます。
用意するもの
- obniz x1
- obnizの電源 x1
- GP2Y0A21YK0F(赤外線距離センサー) x1
- 振動モーター x2
- 歯ブラシの頭 x2
- スマートフォン x1
組み立て方
以下の表や図のように配線します。2つの振動モーターはそれぞれ2つの歯ブラシの上に、GP2Y0A21YK0F(赤外線距離センサ)は歯ブラシの前側に設置します。
| obniz | 部品 |
|---|---|
| 0 | GP2Y0A21YK0F Vcc |
| 1 | GP2Y0A21YK0F GND |
| 2 | GP2Y0A21YK0F signal |
| 4 | 振動モーター1 GND |
| 5 | 振動モーター1 Vcc |
| 6 | 振動モーター2 GND |
| 7 | 振動モーター2 Vcc |
完成したプログラム
うごかす
obnizを電源に繋いでブラウザやobnizのコンソールでプログラムを実行すると、以下のような歯ブラシロボットの操作画面が表示され、歯ブラシロボットを操作できます。
画面のInfoのエリアの色は、前方の障害物までの距離に応じて、遠いほど緑、近いほど赤に変わります。 Manualモードでは、画面のControlエリアのスライダーで左右の振動の強さを調整することで、直進・右左折を自由にコントロールすることができます。 ロボットが見えない場所から、画面の色だけを見て操縦してみるのも面白いかもしれません。 PowerをLow/Middle, またはHighにするとAutoモードとなり、普段は直進し続け、障害物に近づくと自動的に右折することで、半永久的に動き続けることもできます。
なお,ブラシは毛先が斜め後ろを向くように癖をつけておく必要があります。 また1台のスマートフォンからたくさんのobnizを同時に操作することもできるので、このようなロボットをたくさん作り、同時に動かすとお互いに作用して面白いかもしれません。